Казахстанский ученый из сантехнических труб и платформы Arduino собрал робота для подводных исследований


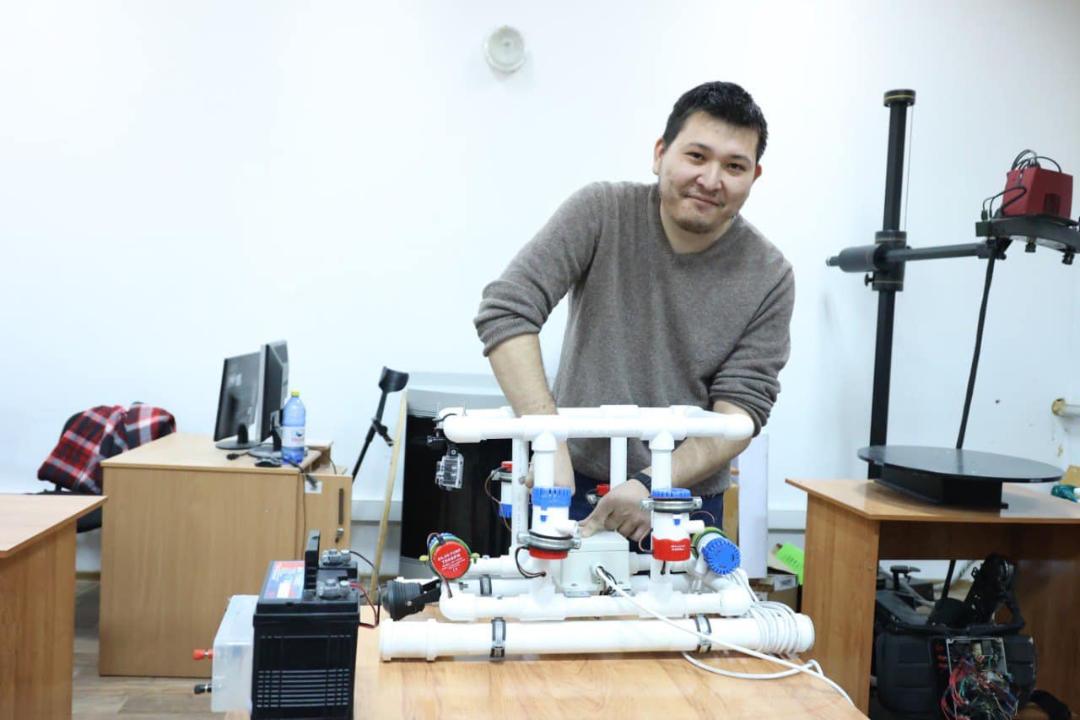
Молодой казахстанский ученый, магистр технических наук Ермухаммед Калменов, работающий на кафедре робототехники Satbayev University, разработал подводного автономного робота, который может быть использован для проведения подводных исследований в самых труднодоступных местах водоемов.
«Исследование Мирового океана, речных и озерных ресурсов — важная задача для современной науки, учитывая важность этих ресурсов и то, что они исследованы только на 6%. Основные проблемы в развитии подводной робототехники заключаются в дороговизне, сложности конструкций, проблемах с системой питания и управления», — говорится в пресс-релизе Министерства науки и высшего образования.
Ермухаммед Калменов предложил инновационный метод конструирования и системы управления, которые могут быть использованы в будущих моделях подводных роботов. Его разработка включает в себя применение машинного обучения для эффективного и надежного перемещения робота под водой, учитывая течения и препятствия. Глубина погружения робота при этом составляет более 100 метров.
Преимущества разработанного прототипа – его доступность для работы в среднеглубоких водоемах Казахстана и Центральной Азии. Каркас робота изготовлен из сантехнических полипропиленовых труб, что делает его недорогим в производстве и легким в управлении и обслуживании. Присутствие аналоговой камеры позволяет использовать робота для подводной видеосъемки и визуального осмотра водоема оператором.
Такой робот может распознавать различные объекты и обстановку под водой, составлять карты подводной местности, обнаруживать утечки или повреждения подводных трубопроводов, структур или оборудования.
Один из ключевых моментов разработки – использование платы Arduino Mega для блока автоматического управления, это позволяет быть ему более доступным и легким в ремонте. Вся концепция разработки направлена на решение проблем подводной робототехники и использование инноваций для дальнейших исследований водных ресурсов планеты.